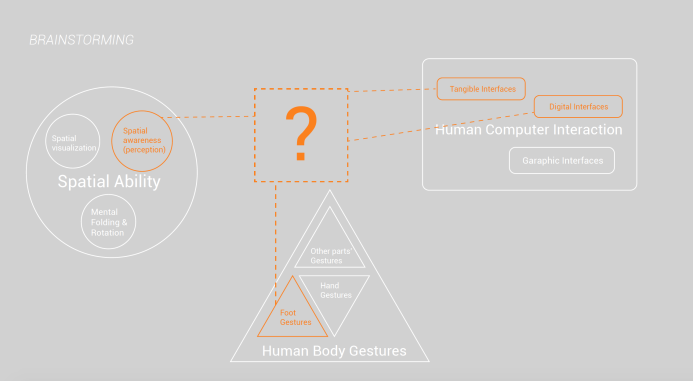
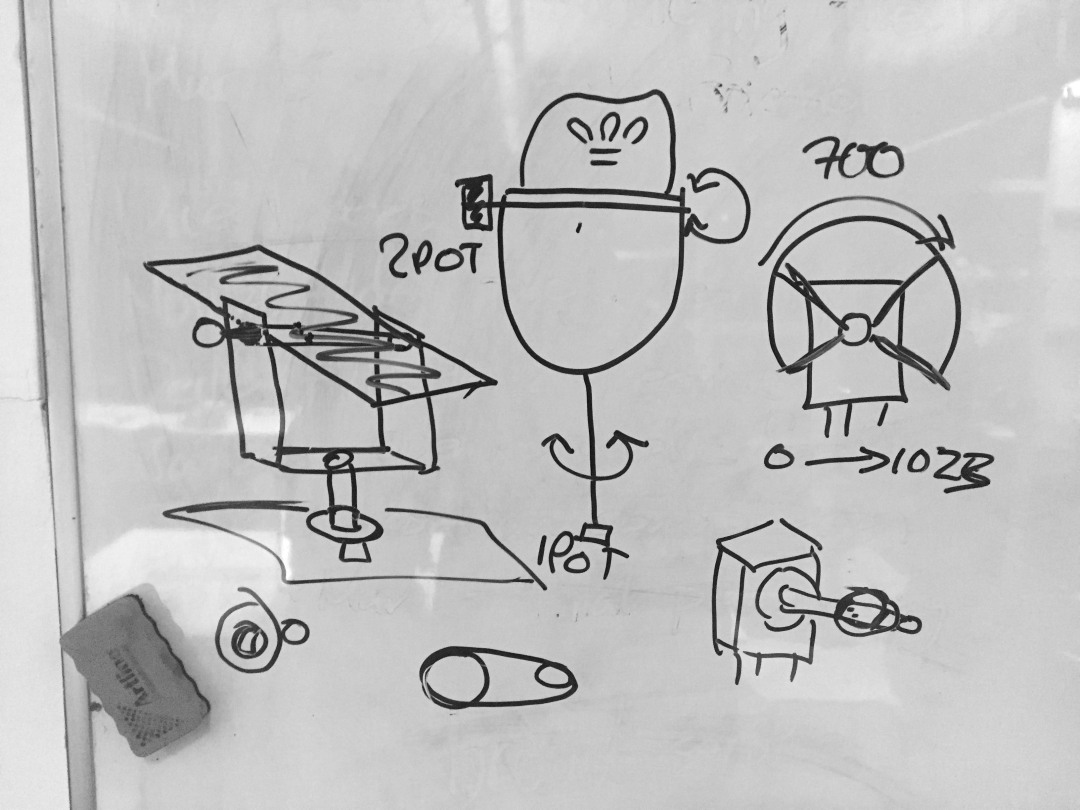
After a lot of research on the feet gestures, tangible interface forms, working principles, and spatial tactic movements, I engaged the concept of the final major project, which uses basic stretching recovery gestures as my project feet gestures. These four simple gestures are rotating front, back, left and right, which responses to the real movement in the basketball game, therefore building a bridge for users in between human feet gestures and the spatial awareness.
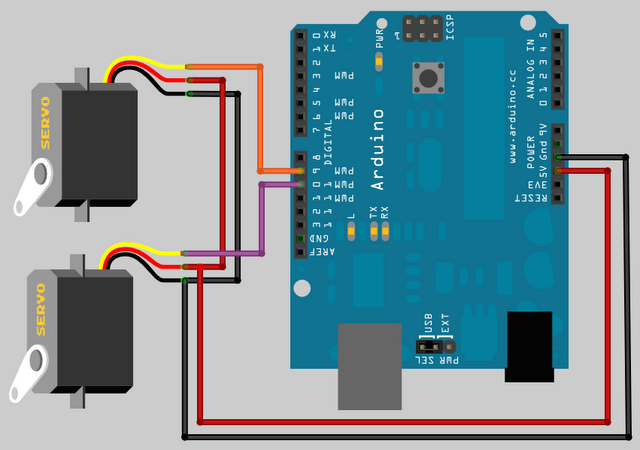
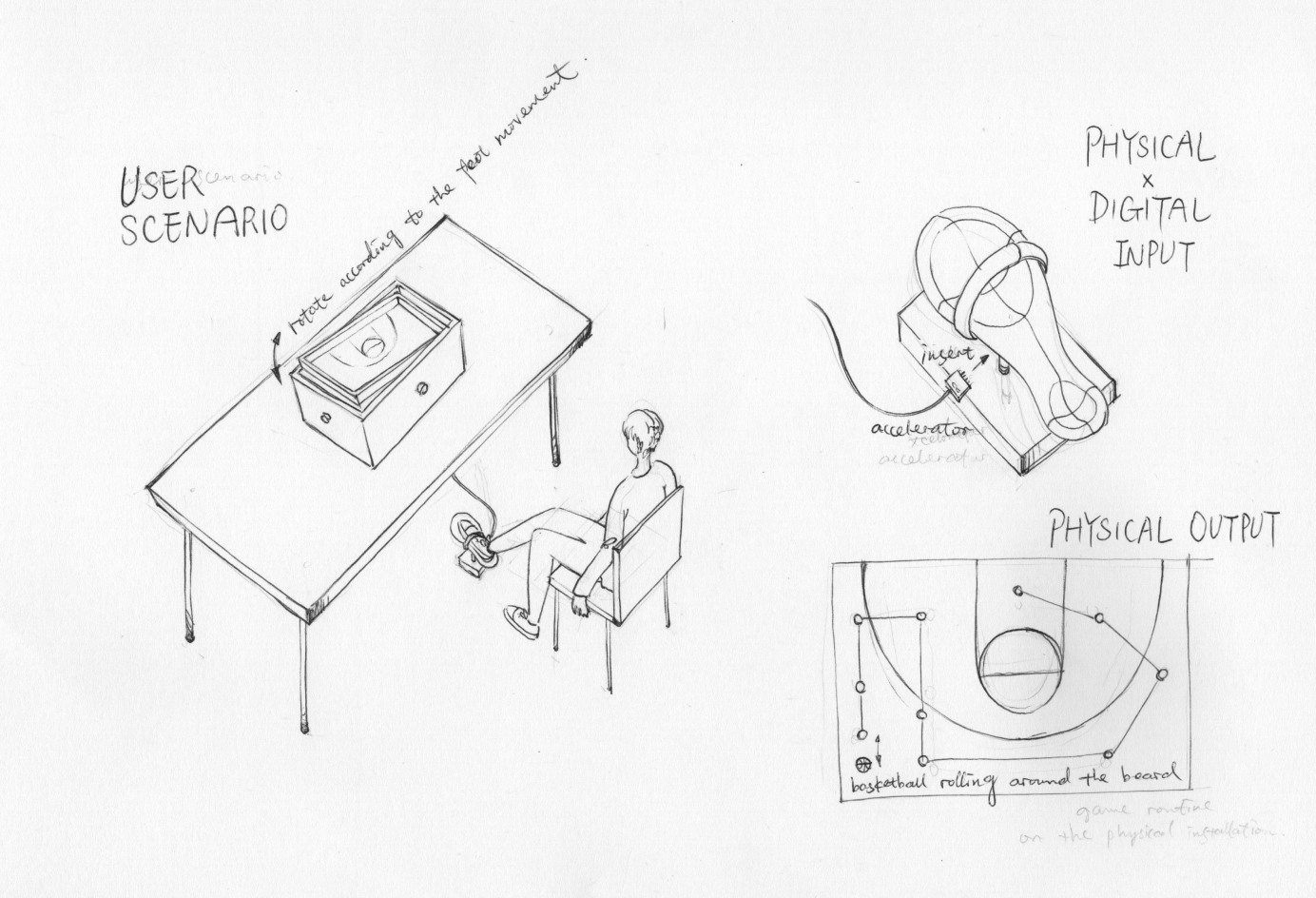
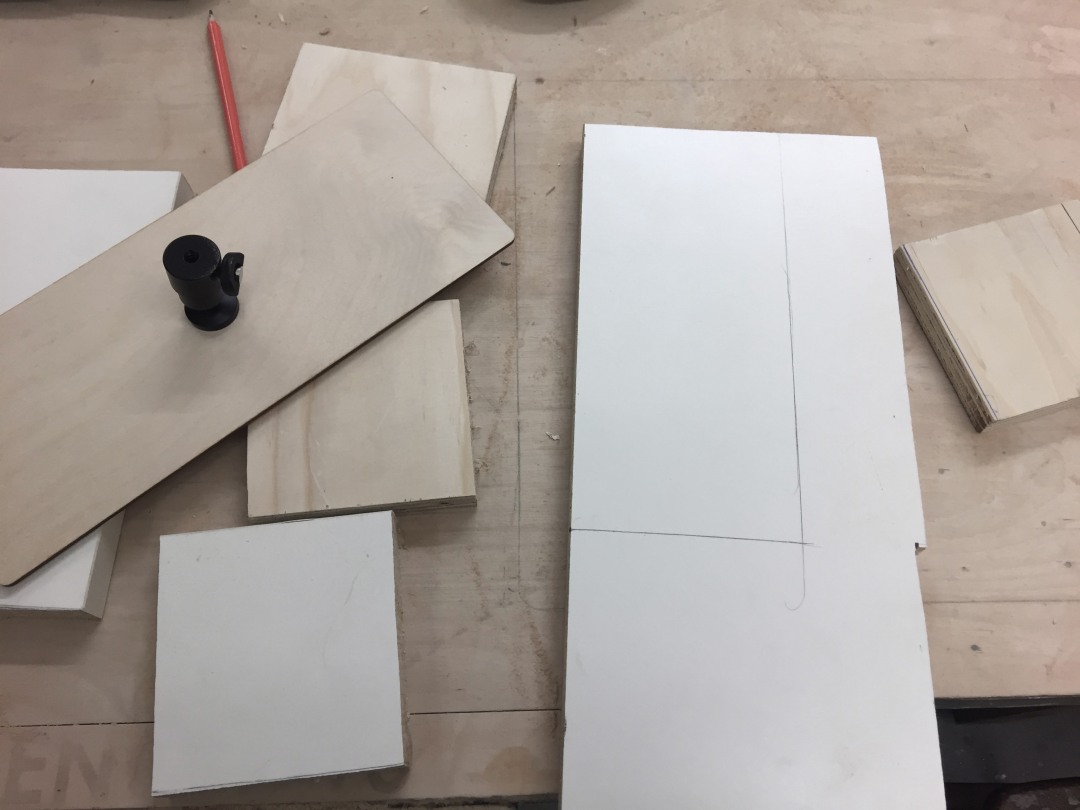
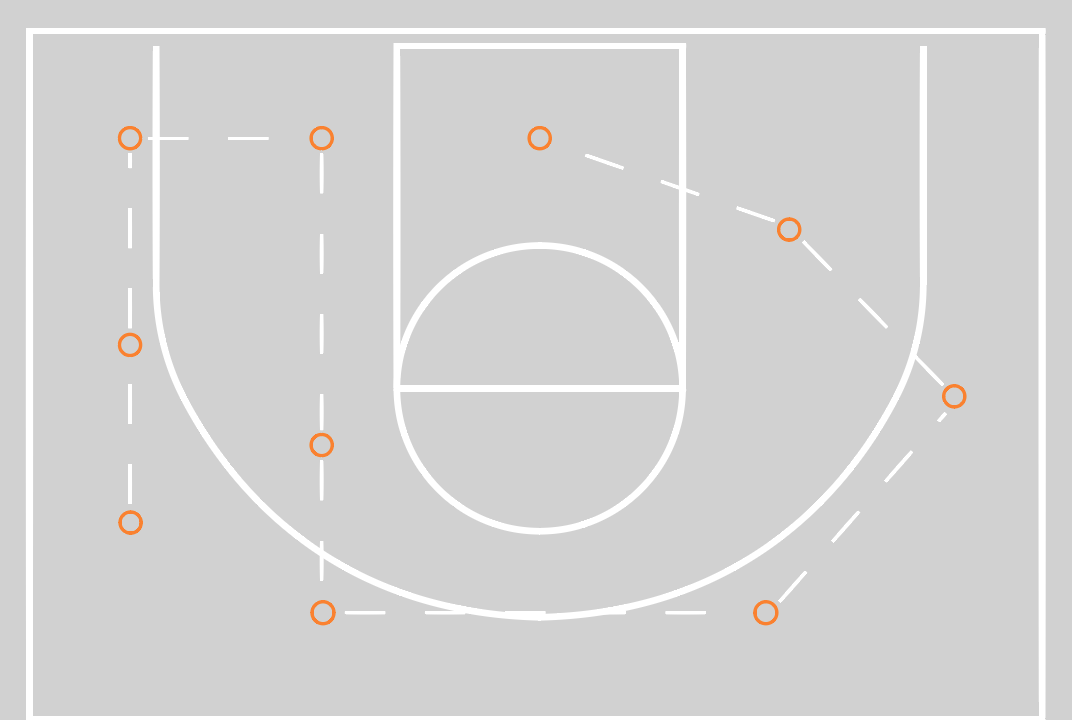
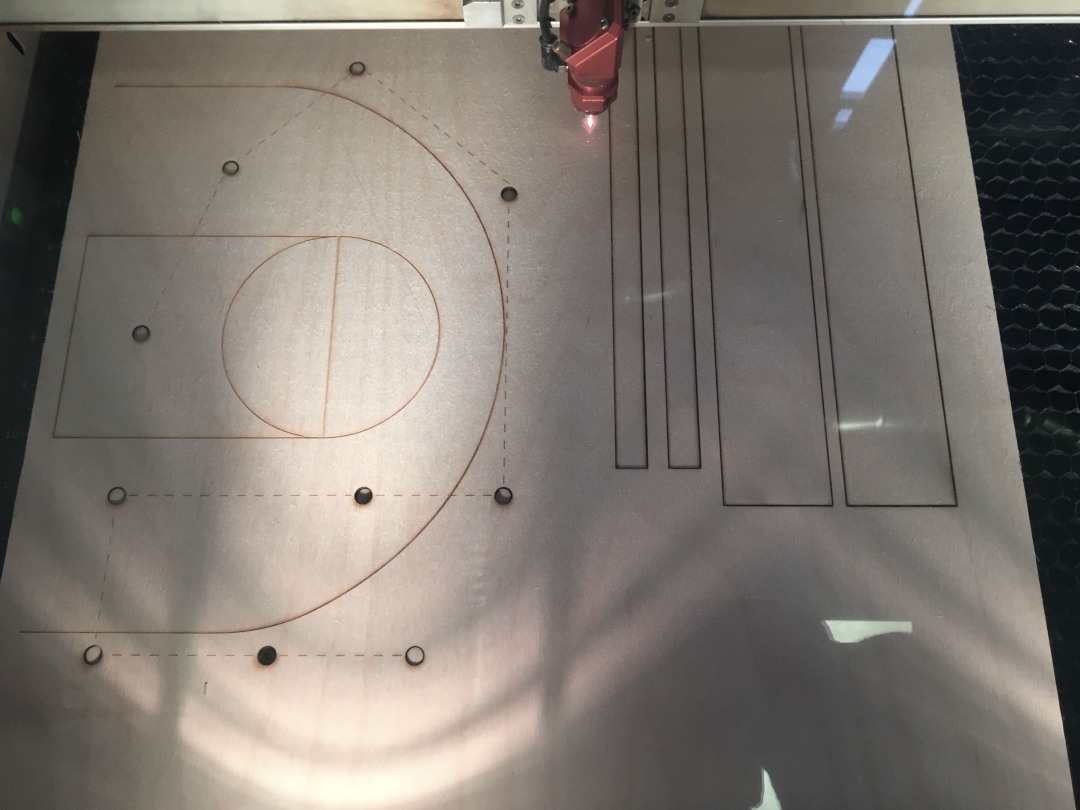
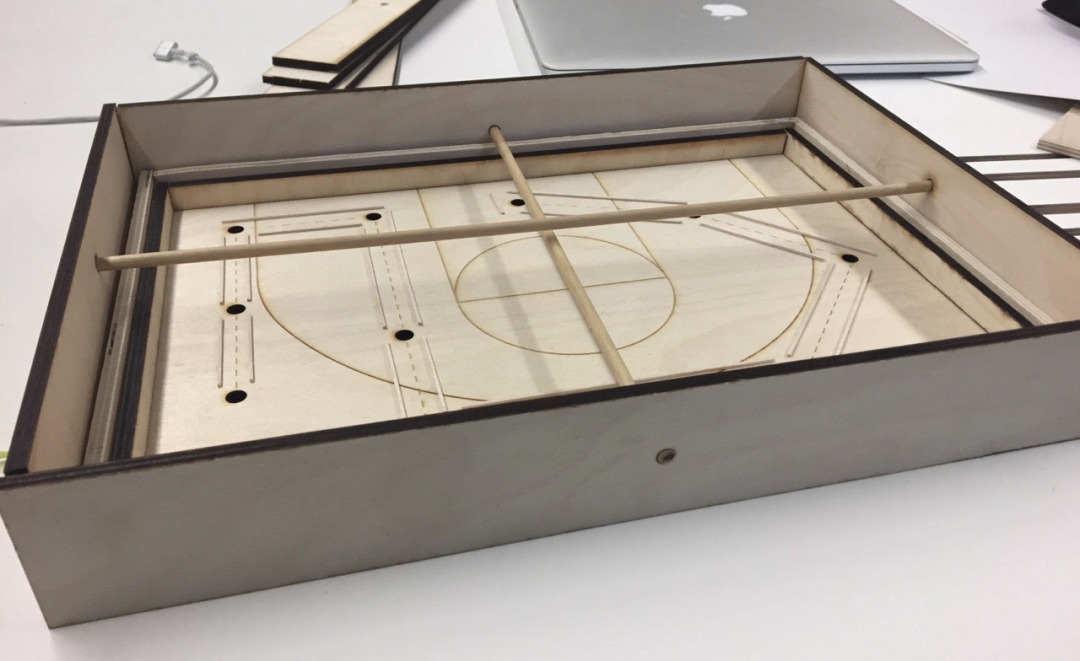
For the movement of user flow of my project, I chose to use a physical interactive interface, that is a wood box which representing a basketball court.In addition, I built a small platform for users to put their feet and control the physical installation. When users put their feet on the platform and rotate in any direction of those four, it will directly control the physical wood sheet as the same slope and the ball will move in this space.
Another point worth mentioning is that users can have a break at any assign point in the flow, this is aimed to consider users from the emotional perspective when they play with it, and to follow the user-friendly design rule.
My Project explores the relationship between the human feet guseture and people’s spatial awareness throughout building a amusing game movement of the interactive installation.
The project consists of two parts, the feet platform which for users to control by rotating left, right, backward and forward. Another part is the physcial wood box what is a ball movement game.
The feet gestures are inspired from the basic streching gestures of the feet injury recovery, and the game procedure is inpired and created by the basketball tactics routine. In my users’ scenario, how the ball go through the path mirrors how the player move in a real basketball game, whcih aims to build a bridge between the Feet gesture and the real movement in a narrative space, and therefore raise users’ Spatial awareness in a enjoyable way.



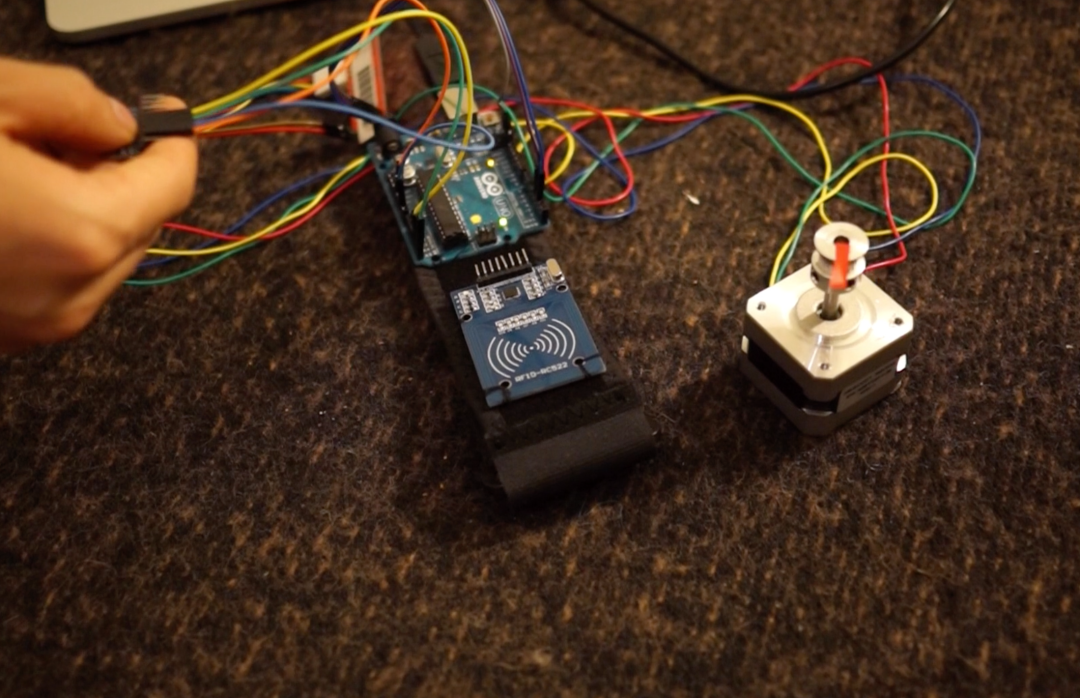

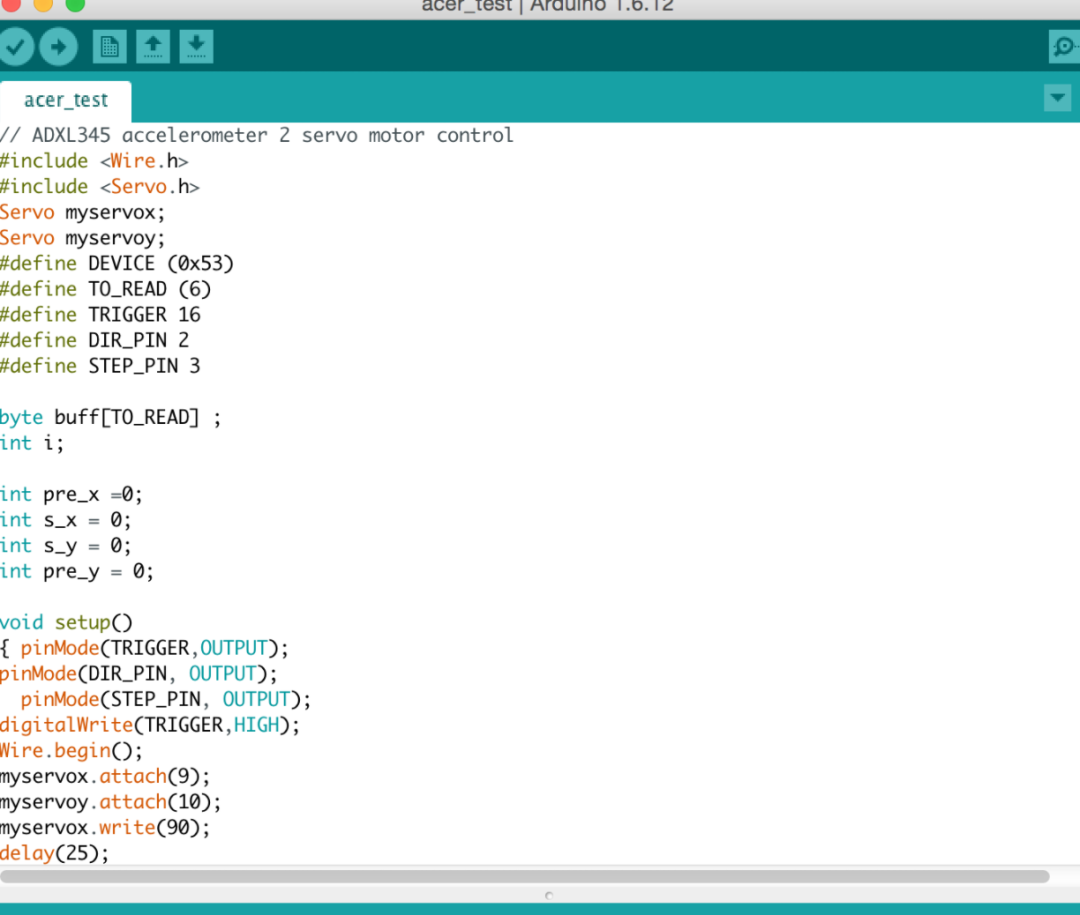


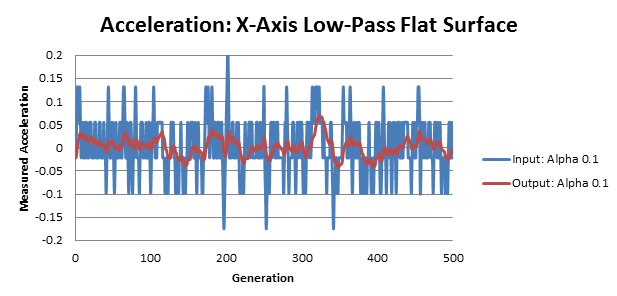
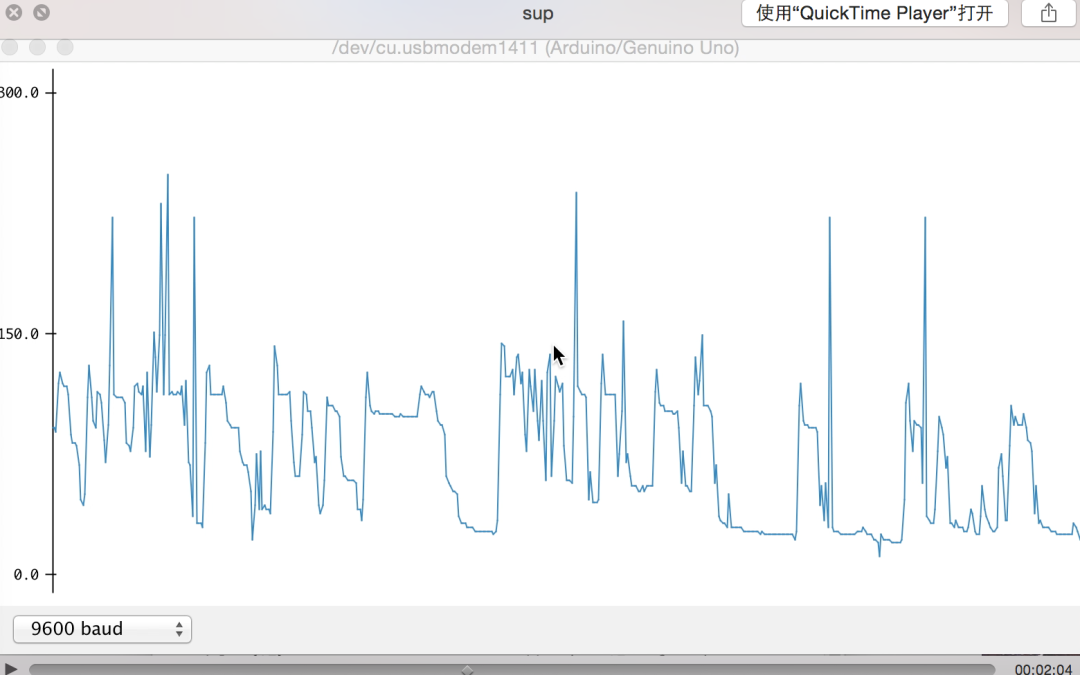
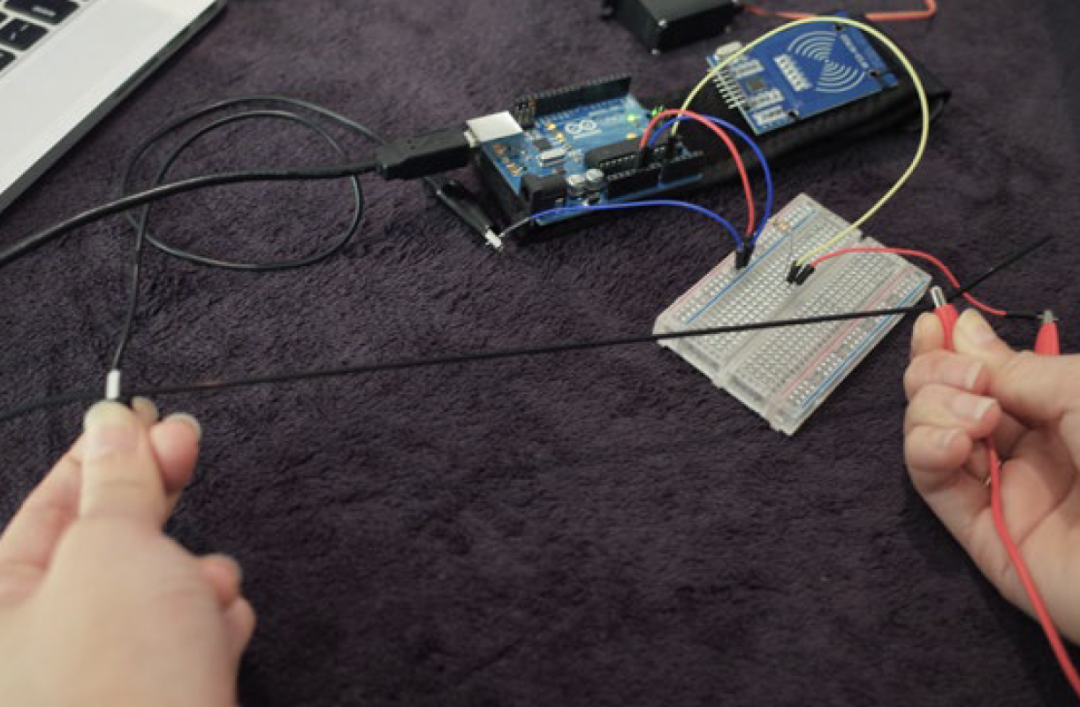
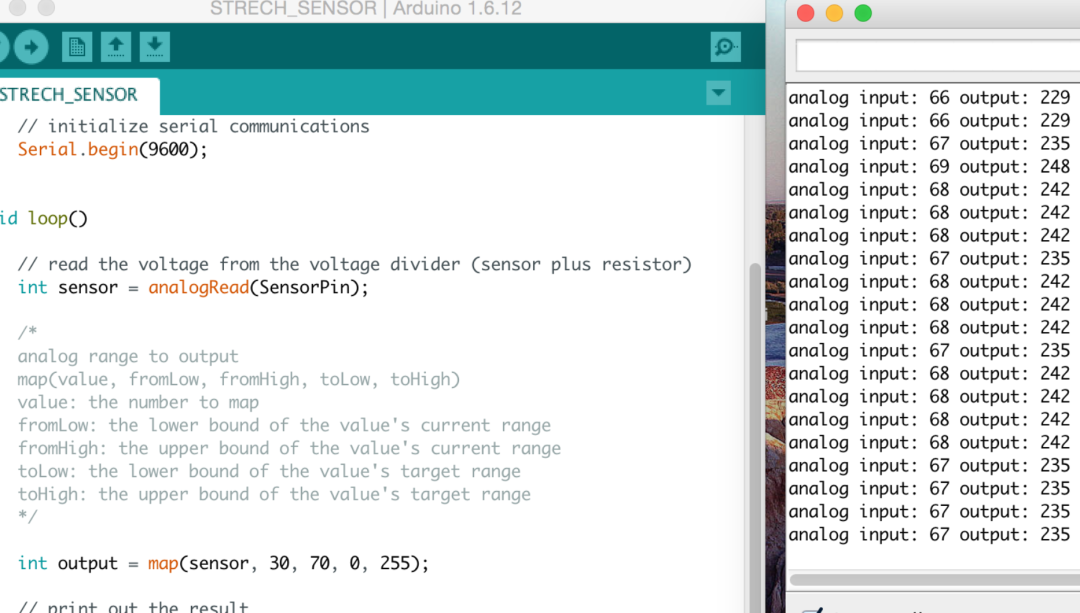 Test the noise of the stretching rubber sensor
Test the noise of the stretching rubber sensor